With the motors the robot can move around.
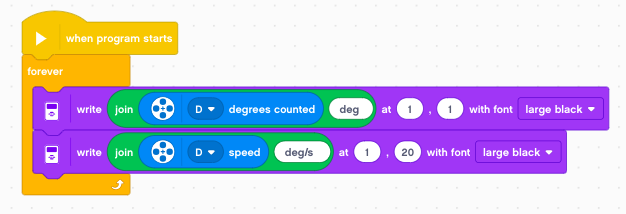
Each motor has a rotational sensor. You can read:
Contents: