Remote¶
The EV3 has an infrared sensor. We connect it to port 4.
The sensor has three functions:
- proximity
- remote
- beacon heading
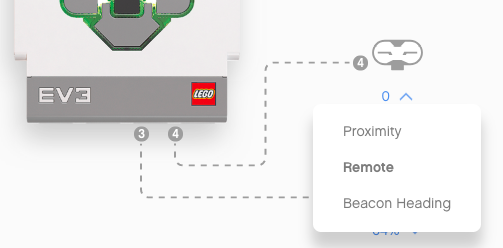
Here we select remote.
In order to be able to control multiple robots separately, the remote control has 4 different channels.
The role of the buttons¶
In the top icon view you can see the sensor state.
When pushing the buttons on the remote control you will get:
- 0 : no button
- 1 : left-top
- 2 : left-bottom
- 3 : right-top
- 4 : right-bottom
- 9 : activate beacon button
You can also press two buttons at the same time:
- 5 : top two
- 6 : diagonal down
- 7 : diagonal up
- 8 : bottom two
- 10 : left two
- 11 : right two
Detect a button press¶
When a button is pressed on the remote control, we can play a sound. For exemple for the left side buttons
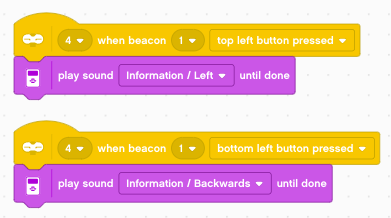
- top left : play left
- bottom left : play backwards
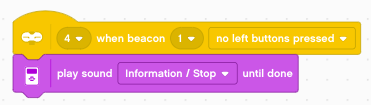
Push a button and hold it for 2-3 seconds. Then release it. This will activate the no left button pressed event, which should rather be called left button released event.
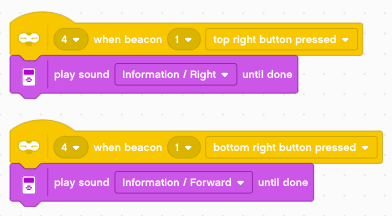
We can program the right side as well.
- top right : play right
- bottom right : play forward
When one of the right buttons is released we do this:
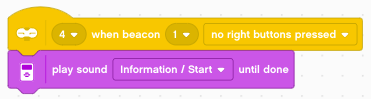
There is one larger button at the top. It activates the beacon and has a toggle function:
- pushing it once, turns on the green LED
- pushing it again, turns the LED off
When pressed, we play the sound activate
Controlling the robot¶
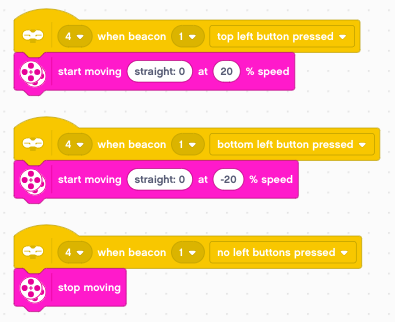
Now we can program the remote unit to control the movement of the robot. We use the left buttons to control the forward/backward movement.
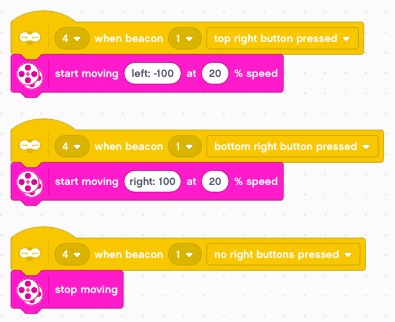
We use the right buttons to control the left/right movement.
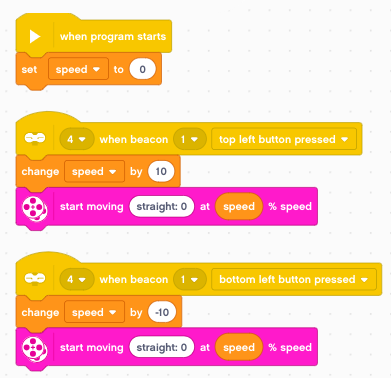
Controlling motor speed¶
A more flexible way would be if we could also control the speed. We createa variable speed and set it to 0 initially.
- the top button increases the speed by 10
- the bottom button decreases the speed by 10
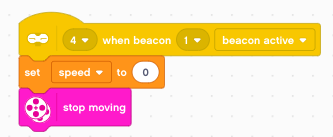
We use the beacon button for the emergency brake.
And the right side buttons are used to pivot left and right, as long as the buttons are pressed.
